Intel Realsense を動かしてみよう #2
2023 年 02 月 13 日 Linux 技術ネタ
目次
1. はじめに
第 2 部では、Advantech 社から提供されている RSB-3720 ボードに対して、Intel RealSense™ depth camera D435 を使用するための、起動イメージの構築、RealSense SDK のインストール、Python を用いた自作プログラム実装の流れを説明します。
2. Advantech RSB-3720 について
RSB-3720 は、Advantech 社が開発した ARM プロセッサ搭載の小型モジュールです。主な機能としては
- 最大 1.8GHz の NXP Arm® Cortex®-A53 i.MX8M Plus 搭載(クアッド/デュアル)
- LPDDR4 4 GB / 6 GB、4000M/s メモリをオンボード
- HDMI (1920x1080/60Hz)、1~2x 24 ビット LVDS (BOMオプションで1x 4レーンMIPI-DSI)
- 1x 4 線式 RS-232 / 422 / 485、1x USB3.2 Gen1、1x USB2.0、1x マイクロ SD
- 1x ミニ PCIe (3G / 4G向け)、1 つの M.22230 キー E スロット
- Yocto Linux・Android をサポート
- I/O 拡張ボード「UIO40-Express」搭載
といったものがあります。
| Memory | On-board LDDDR4 4GB/6GB |
|---|---|
| CPU | NXP i.MX8M Plus Cortex-A53 Quad/Dual core(up to 1.8GHz) |
| Linux | Yocto Linux & Android |
| Power Supply Voltage | 12V |
| Power Consumption | 7.13W (Max) |
| Dimension (mm) | 100 x 72 x 19 mm |
3. ボードのセットアップ
3.1 起動手順
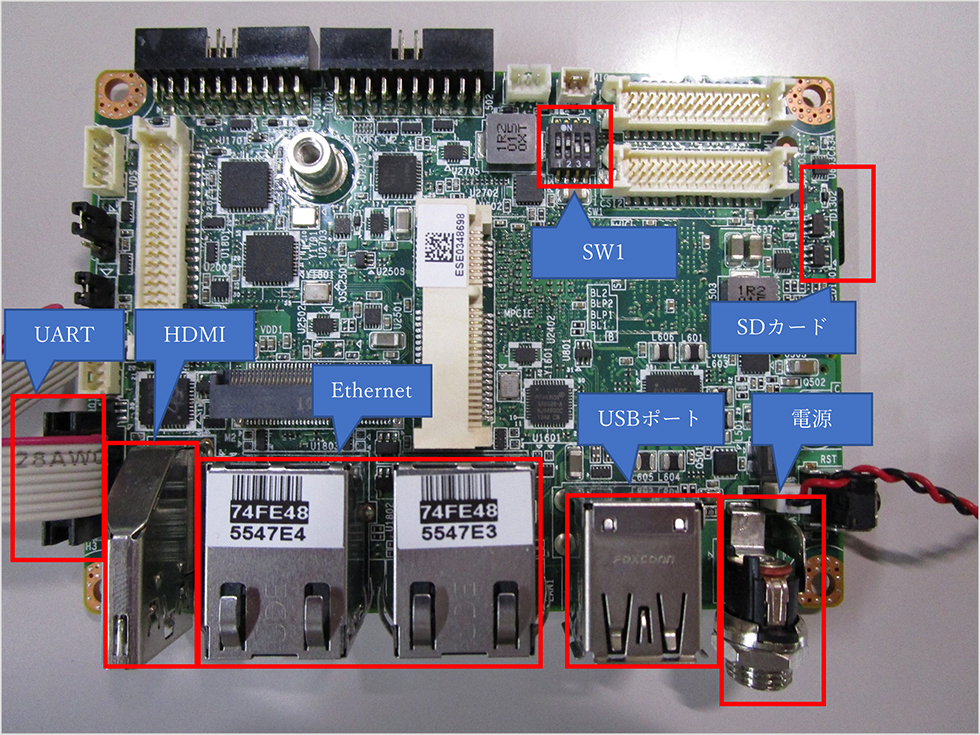
各機器、ケーブルを 3.2 節の接続図のように接続します。
電源ケーブルを接続すると、すぐにボードが起動します。起動スイッチはありません。SW1 は起動方式を選択するためのスイッチです。以下の表のように設定します。(上:ON 下:OFF)
| 起動方式 | SW1-1 | SW1-2 | SW1-3 | SW1-4 |
|---|---|---|---|---|
| emmc ブート | OFF | ON | OFF | OFF |
| SD ブート | ON | ON | OFF | OFF |
USB ポートにキーボードやマウスを接続すると、HDMI ディスプレイ上の GUI の操作を行うことができます。
SD カードに書き込むイメージについては、次章で説明します。
3.2 接続図
各種機器やケーブルは以下の図のように接続します。
4. RSB-3720 起動イメージの構築
4.1 Ubuntu イメージの入手と構築
ホストPC (Ubuntu20.04.1 LTS) にて、起動イメージの構築作業を行います。Advantech が提供しているUbuntu イメージを以下のリンクからダウンロードします。
起動用 SD カードに Ubuntu イメージを書き込みます。
$ gzip -d 3720A1AIM30UIVA0362_iMX8MP_6G_2021-11-29.img.gz SDカードのデバイス名が /dev/sdx の場合 $ sudo dd if=3720A1AIM30UIVA0362_iMX8MP_6G_2021-11-29.img of=/dev/sdx bs=1M conv=fsync
4.2 起動確認
Ubuntu イメージを書き込んだ SD カードをターゲットボードに差し込み、起動確認を行います。
以下より、RSB-3720 上でのコマンド操作を背景黄色で表現します。
次のユーザでログインできることを確認します。
Password: adv
adv@imx8mprsb3720a1:~$
ディストリビューションのバージョンを確認します。
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 18.04.6 LTS
Release: 18.04
Codename: bionic
5. Intel RealSenseを動かす
SD カード内の Ubuntu (aarch64) イメージに対して RealSense SDK の導入を行い、自作プログラムを実装します。
5.1 realsense-viewer の起動
5.1.1 RealSense SDK のインストール
必要なパッケージをインストールします。
$ sudo apt install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev \
libglfw3-dev cmake freeglut3-dev
Github から RealSense SDK のソースファイルをダウンロードして、ビルドとインストールを行います。
$ mkdir -p librealsense/build
$ cd librealsense
$ sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
$ sudo udevadm control --reload-rules && udevadm trigger
$ cd build
$ cmake ..
$ make -j4
$ sudo make install
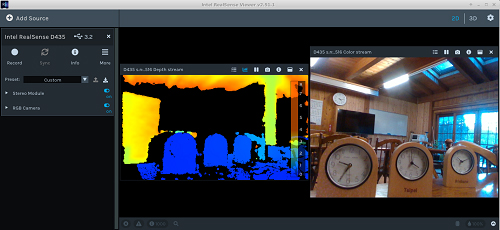
5.1.2 realsense-viewer の起動
以下のコマンドより realsense-viewer が起動します。
以下のような Depth カメラと RGB カメラの映像が表示されれば、OK です。
5.2 Python を用いた自作プログラムの実装
いよいよ本題となる、Python を用いた自作プログラムの実装にチャレンジしていきます。
5.2.1 Python モジュールのインストール
Python 本体と pip をインストールします。
$ sudo apt install wget
$ wget https://bootstrap.pypa.io/get-pip.py
$ python3 get-pip.py
後に使用するモジュールをインストールします。
$ python3 -m pip install opencv-python
Intel RealSense SDK 内に用意されている Python モジュールをビルドしてインストールします。
$ cmake ../ -DBUILD_PYTHON_BINDINGS:bool=true
$ make -j4
$ sudo make install
標準に設定されている Python のバージョンを確認して、そのバージョンで指定されたライブラリ内に RealSense 用の so ファイルが生成されていることを確認します。
Python 3.6.9
$ ls -la /usr/local/lib/python3.6/pyrealsense2/
total 30232
-rw-r--r-- 1 root staff 13232368 Nov 29 02:29 pybackend2.cpython-36m-aarch64-lin ux-gnu.so.2.51.1
-rw-r--r-- 1 root staff 17713584 Nov 29 02:33 pyrealsense2.cpython-36m-aarch64-l inux-gnu.so.2.51.1
...
Python の site-packages に生成された so ファイルのシンボリックリンクを作成します。
$ sudo ln -s /usr/local/lib/python3.6/pyrealsense2/pybackend2.cpython-36m-aarch64-linux-gnu.so.2.51.1 pybackend2.so
$ sudo ln -s /usr/local/lib/python3.6/pyrealsense2/pyrealsense2.cpython-36m-aarch64-linux-gnu.so pyrealsense2.so
5.2.2 サンプルプログラムの動作確認
Intel RealSense SDK 内に用意されているサンプルプログラムを動かしてみます。
$ python3 opencv_viewer_example.py
$ python3 align-depth2color.py
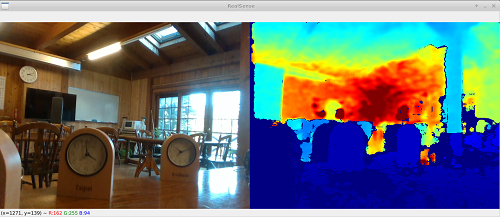
opencv_viewer_example.py の表示
RGB カメラと Depth カメラの映像が表示されます。
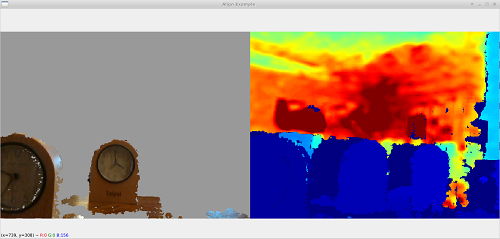
align-depth2color.py の表示
RGB カメラの背景画像が深度情報よりフィルタリングされます。
5.2.3 自作プログラムの作成と実装
SDK 内のサンプルプログラムが動作することが確認できましたので、RealSense の Python 環境構築は問題なさそうです。
そこで、自作プログラムの作成をトライしてみます。まずはワークスペースを準備します。
$ cd ~/workspace
$ touch my_program1.py
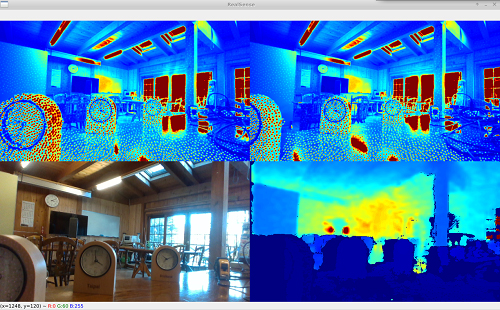
サンプルプログラムを参考にし、RealSense に搭載されている 4 つのカメラ (IR1, IR2, Depth, RGB) の映像を表示するプログラムを作成しました。
my_program1.py
import pyrealsense2 as rs
import numpy as np
import cv2
# ストリームの設定
config = rs.config()
config.enable_stream(rs.stream.infrared, 1, 640, 480, rs.format.y8, 30)
config.enable_stream(rs.stream.infrared, 2, 640, 480, rs.format.y8, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
# ストリーミング開始
pipeline = rs.pipeline()
pipeline.start(config)
try:
while True:
# フレーム待ち
frames = pipeline.wait_for_frames()
#IR1
ir_frame1 = frames.get_infrared_frame(1)
ir_image1 = np.asanyarray(ir_frame1.get_data())
#IR2
ir_frame2 = frames.get_infrared_frame(2)
ir_image2 = np.asanyarray(ir_frame2.get_data())
# RGB
color_frame = frames.get_color_frame()
color_image = np.asanyarray(color_frame.get_data())
# 深度
depth_frame = frames.get_depth_frame()
depth_image = np.asanyarray(depth_frame.get_data())
# 2次元データをカラーマップに変換
ir_colormap1 = cv2.applyColorMap(cv2.convertScaleAbs(ir_image1), cv2.COLORMAP_JET)
ir_colormap2 = cv2.applyColorMap(cv2.convertScaleAbs(ir_image2), cv2.COLORMAP_JET)
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.02), cv2.COLORMAP_JET)
# イメージの結合
images = np.vstack(( np.hstack((ir_colormap1, ir_colormap2)), np.hstack((color_image, depth_colormap)) ))
# 表示
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', images)
# q キー入力で終了
if cv2.waitKey(1) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
finally:
# ストリーミング停止
pipeline.stop()
表示した映像が以下となります。上 2 つが赤外線カメラ (IR1, IR2)、左下が RGB カメラ、右下が Depth カメラの映像となります。
5.2.4 応用実装(距離の測定)
応用編として、RealSense から物体までの距離を測定するプログラムを作成しました。
my_program2.py
import pyrealsense2 as rs
import numpy as np
import cv2
# ストリームの設定
config = rs.config()
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
# ストリーミング開始
pipeline = rs.pipeline()
pipeline.start(config)
# Alignオブジェクト生成
align_to = rs.stream.color
align = rs.align(align_to)
try:
while True:
# フレーム待ち
frames = pipeline.wait_for_frames()
# RGBとDepthの位置ずれを修正
aligned_frames = align.process(frames)
# RGB
color_frame = aligned_frames.get_color_frame()
color_image = np.asanyarray(color_frame.get_data())
# 深度
depth_frame = aligned_frames.get_depth_frame()
depth_image = np.asanyarray(depth_frame.get_data())
# 2次元データをカラーマップに変換
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.02), cv2.COLORMAP_JET)
### 画像処理 ###
# ポイントで指定した箇所の奥行きを計算
px = 320
py = 240
depth_data = depth_frame.get_distance(px, py)
# ポイントにマーカーと距離を表示
depth_str = str(round(depth_data, 2)) + "m"
cv2.drawMarker(color_image, (px,py), (0,0,255))
cv2.putText(color_image, depth_str, (px,py), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0,0,255), thickness=2)
cv2.drawMarker(depth_colormap, (px,py), (0,0,255))
cv2.putText(depth_colormap, depth_str, (px,py), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0,0,255), thickness=2)
### 画像処理 end ###
# イメージの結合
images = np.hstack((color_image, depth_colormap))
# 表示
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', images)
# q キー入力で終了
if cv2.waitKey(1) & 0xFF == ord('q'):
cv2.destroyAllWindows()
break
finally:
# ストリーミング停止
pipeline.stop()
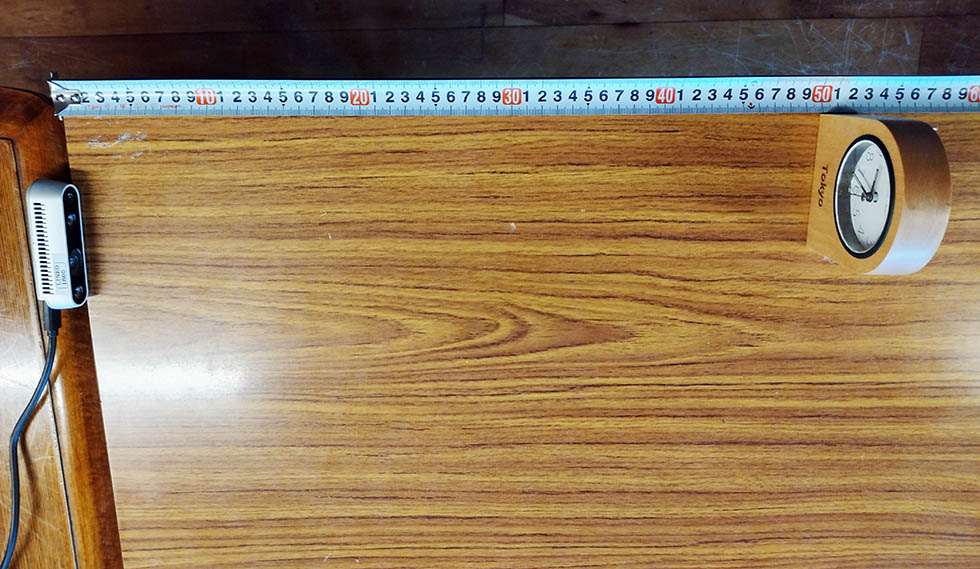
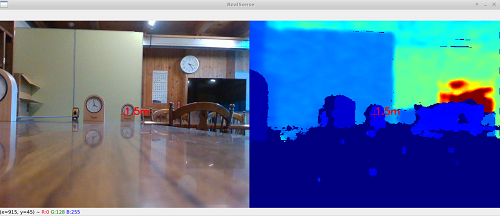
カメラから 50cm 間隔で時計を配置し、距離を計測します。

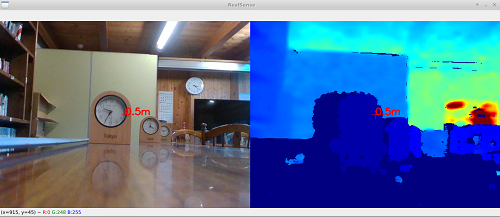
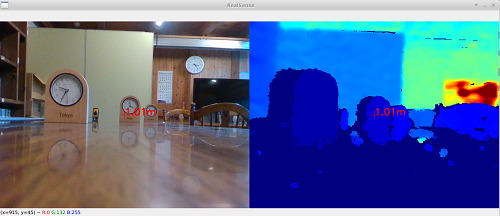
表示された映像が以下となります。
画面中央にあるマーカーの画素で奥行を測定しています。測定データを元に距離 (m) データに変換し、画面上に表示しています。
6. まとめ
RSB-3720 上でも、第 1 回目と同様に RealSense カメラの動作環境を構築することができました。
今回はサンプルアプリケーションだけでなく、Python を用いて自作したプログラムでカメラ表示を行ってみましたが、比較的容易にプログラムを書くことができ、開発の幅が広がったと感じます。
Python からの制御ができるメリットとして、ML ソフトウェア開発との親和性があると考えます。
NXP i.MX8M Plus の Linux 環境では、NXP 社から ML ソフトウェア開発のベースプラットフォームとして、eIQ® ML ソフトウェア開 success 発環境 が提供されています。
eIQ を活用することで、ML ソフトウェア開発への着手が容易となります。
- メジャーな ML 推論エンジンが使用できる環境がすぐに用意できる(DeepViewRT™、TendorFlow™、etc...)
- ビッグデータを用意しなくても ML 推論エンジンの評価が可能
NXP i.MX8M Plus をベースとしている、RSB-3720 の BSP (Advantech) でも、eIQ で ML ソフトウェアが構築可能です。
また、ML ソフトウェアは基本的に Python アプリケーションで構成されるため、Intel RealSense と組み合わせることで、物体検出、認識など ML ソフトウェアの開発の加速が期待できます。
■ Intel RealSense が活躍する場面
- ロボットの目として (対象物・障害物との距離の測定、地形把握)
- 顔認証の精度向上 (セキュリティ認証の強化)

記事カテゴリ別新着一覧
Vigiles サポート

Vigiles ファーストステップガイド 4 「SBOM ダッシュボードの使い方」
2025 年 05 月 14 日 Vigiles サポート
Vigiles ファーストステップガイド 3 「Build root 環境の Vigiles 導入手順」
2024 年 09 月 02 日 Vigiles サポート
Vigiles ファーストステップガイド 2 「Yocto 環境への Vigiles 導入手順」
2024 年 03 月 01 日 Vigiles サポート
Yocto Project よもやま話

Yocto よもやま話 第 19 回 「Yocto Project 5.3 Whinlatter」
2026 年 02 月 09 日 Yocto Project よもやま話
Yocto よもやま話 第 18 回 「Yocto Project 5.2 Walnascar」
2026 年 02 月 09 日 Yocto Project よもやま話
Yocto よもやま話 第 17 回 「Yocto Project 5.1 Styhead」
2026 年 02 月 09 日 Yocto Project よもやま話
Linux 技術ネタ

RISC-Vについて学ぶ-後編
2024 年 01 月 10 日 Linux 技術ネタ

RISC-Vについて学ぶ-前編
2023 年 12 月 12 日 Linux 技術ネタ

デバイスツリーとサウンド設定(widgets, routing)について学ぶ:後編
2023 年 03 月 31 日 Linux 技術ネタ
イベントレポート

EdgeTech+ 2025 出展レポート
2025 年 12 月 01 日 イベントレポート

EdgeTech+ West 2025 出展レポート
2025 年 08 月 08 日 イベントレポート

EdgeTech+ 2024 出展レポート
2024 年 12 月 06 日 イベントレポート
リクルート

新卒採用、絶賛募集中!
2025 年 04 月 01 日 リクルート

新卒採用、絶賛募集中!
2023 年 05 月 30 日 リクルート
大しごとーく & オープン・カンパニー in 信州 2022
2022 年 12 月 27 日 リクルート
信州リネオ便り

松本市のアジサイ寺散策(法船寺・弘長寺)
2026 年 07 月 01 日 信州リネオ便り

新たな信州土産を入手しました
2026 年 05 月 25 日 信州リネオ便り

旧制松本高等学校を歩く
2026 年 04 月 09 日 信州リネオ便り
ソリューション統括部

Zephyrブログ 第三回 「LCD に表示してみる」
2026 年 05 月 26 日 ソリューション統括部
Zephyrブログ 第二回 はじめての Zephyr(後編)
2026 年 04 月 14 日 ソリューション統括部
Zephyrブログ 第一回 はじめての Zephyr(前編)
2026 年 03 月 18 日 ソリューション統括部
マーケティング統括部

大成功決起大会!!(ET2019)
2019 年 12 月 13 日 マーケティング統括部

ESEC 2019 決起大会
2019 年 04 月 25 日 マーケティング統括部

シリコンバレー探検記 その 2
2018 年 12 月 18 日 マーケティング統括部


